Each node in the graph contains a value (int) and a list (List[Node]) of its neighbors.
class Node {
public int val;
public List<Node> neighbors;
}
Test case format:
For simplicity, each node's value is the same as the node's index (1-indexed). For example, the first node with val == 1, the second node with val == 2, and so on. The graph is represented in the test case using an adjacency list.
An adjacency list is a collection of unordered lists used to represent a finite graph. Each list describes the set of neighbors of a node in the graph.
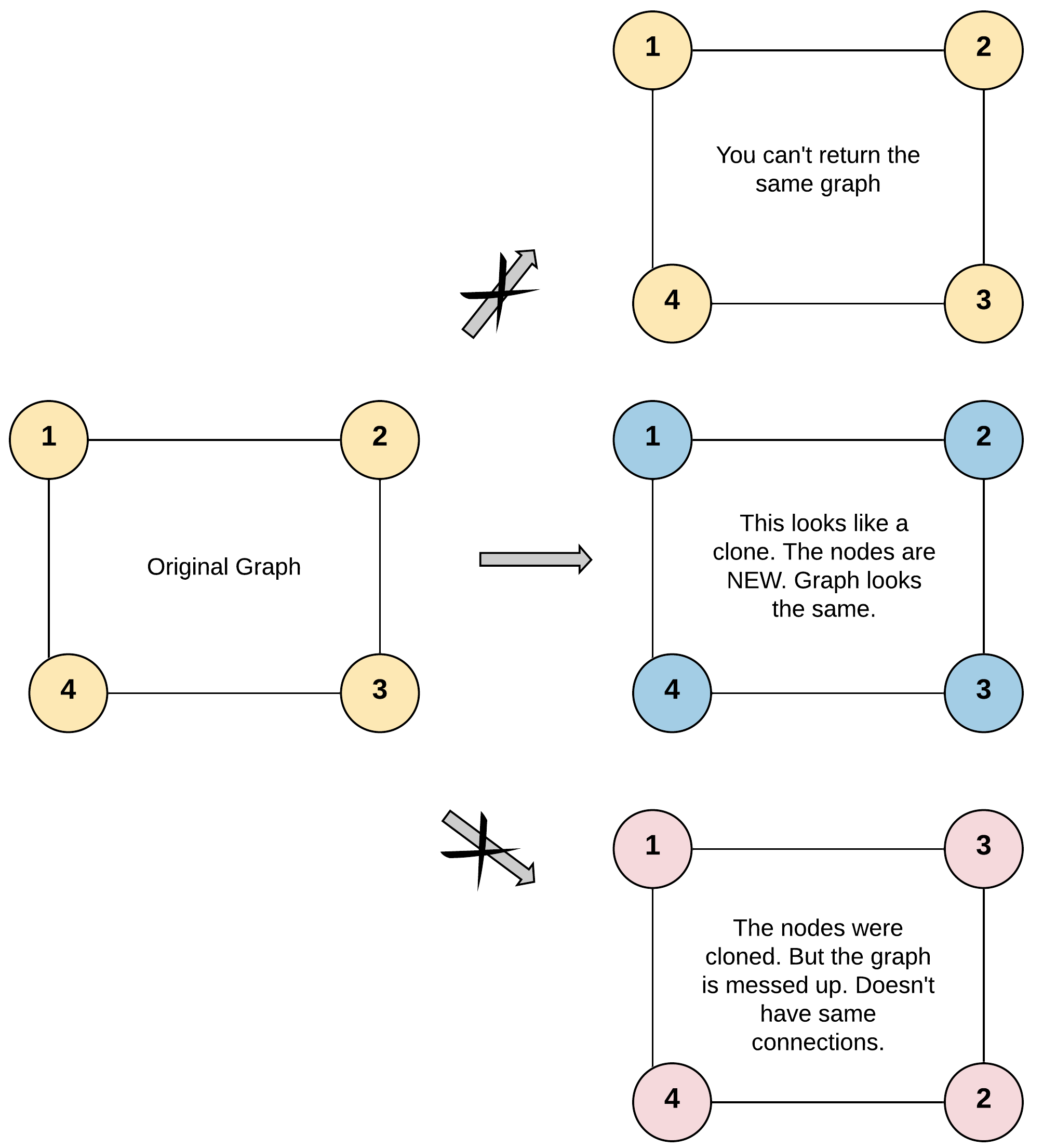
The given node will always be the first node with val = 1. You must return the copy of the given node as a reference to the cloned graph.
Example 1:
Input: adjList = [[2,4],[1,3],[2,4],[1,3]]
Output: [[2,4],[1,3],[2,4],[1,3]]
Explanation: There are 4 nodes in the graph.
1st node (val = 1)'s neighbors are 2nd node (val = 2) and 4th node (val = 4).
2nd node (val = 2)'s neighbors are 1st node (val = 1) and 3rd node (val = 3).
3rd node (val = 3)'s neighbors are 2nd node (val = 2) and 4th node (val = 4).
4th node (val = 4)'s neighbors are 1st node (val = 1) and 3rd node (val = 3).
Example 2:
Input: adjList = [[]]
Output: [[]]
Explanation: Note that the input contains one empty list. The graph consists of only one node with val = 1 and it does not have any neighbors.
Example 3:
Input: adjList = []
Output: []
Explanation: This an empty graph, it does not have any nodes.
Constraints:
The number of nodes in the graph is in the range [0, 100].
1 <= Node.val <= 100
Node.val is unique for each node.
There are no repeated edges and no self-loops in the graph.
The Graph is connected and all nodes can be visited starting from the given node.
Solutions
Solution 1: Hash Table + DFS
We use a hash table \(\textit{g}\) to record the correspondence between each node in the original graph and its copy, and then perform depth-first search.
We define the function \(\text{dfs}(node)\), which returns the copy of the \(\textit{node}\). The process of \(\text{dfs}(node)\) is as follows:
If \(\textit{node}\) is \(\text{null}\), then the return value of \(\text{dfs}(node)\) is \(\text{null}\).
If \(\textit{node}\) is in \(\textit{g}\), then the return value of \(\text{dfs}(node)\) is \(\textit{g}[node]\).
Otherwise, we create a new node \(\textit{cloned}\) and set the value of \(\textit{g}[node]\) to \(\textit{cloned}\). Then, we traverse all the neighbor nodes \(\textit{nxt}\) of \(\textit{node}\) and add \(\text{dfs}(nxt)\) to the neighbor list of \(\textit{cloned}\).
Finally, return \(\textit{cloned}\).
In the main function, we return \(\text{dfs}(node)\).
The time complexity is \(O(n)\), and the space complexity is \(O(n)\). Here, \(n\) is the number of nodes.
"""# Definition for a Node.class Node: def __init__(self, val = 0, neighbors = None): self.val = val self.neighbors = neighbors if neighbors is not None else []"""fromtypingimportOptionalclassSolution:defcloneGraph(self,node:Optional["Node"])->Optional["Node"]:defdfs(node):ifnodeisNone:returnNoneifnodeing:returng[node]cloned=Node(node.val)g[node]=clonedfornxtinnode.neighbors:cloned.neighbors.append(dfs(nxt))returnclonedg=defaultdict()returndfs(node)
/*// Definition for a Node.class Node { public int val; public List<Node> neighbors; public Node() { val = 0; neighbors = new ArrayList<Node>(); } public Node(int _val) { val = _val; neighbors = new ArrayList<Node>(); } public Node(int _val, ArrayList<Node> _neighbors) { val = _val; neighbors = _neighbors; }}*/classSolution{privateMap<Node,Node>g=newHashMap<>();publicNodecloneGraph(Nodenode){returndfs(node);}privateNodedfs(Nodenode){if(node==null){returnnull;}Nodecloned=g.get(node);if(cloned==null){cloned=newNode(node.val);g.put(node,cloned);for(Nodenxt:node.neighbors){cloned.neighbors.add(dfs(nxt));}}returncloned;}}
/** * Definition for a Node. * type Node struct { * Val int * Neighbors []*Node * } */funccloneGraph(node*Node)*Node{g:=map[*Node]*Node{}vardfsfunc(node*Node)*Nodedfs=func(node*Node)*Node{ifnode==nil{returnnil}ifn,ok:=g[node];ok{returnn}cloned:=&Node{node.Val,[]*Node{}}g[node]=clonedfor_,nxt:=rangenode.Neighbors{cloned.Neighbors=append(cloned.Neighbors,dfs(nxt))}returncloned}returndfs(node)}
/*// Definition for a Node.public class Node { public int val; public IList<Node> neighbors; public Node() { val = 0; neighbors = new List<Node>(); } public Node(int _val) { val = _val; neighbors = new List<Node>(); } public Node(int _val, List<Node> _neighbors) { val = _val; neighbors = _neighbors; }}*/publicclassSolution{publicNodeCloneGraph(Nodenode){varg=newDictionary<Node,Node>();NodeDfs(Noden){if(n==null){returnnull;}if(g.ContainsKey(n)){returng[n];}varcloned=newNode(n.val);g[n]=cloned;foreach(varneighborinn.neighbors){cloned.neighbors.Add(Dfs(neighbor));}returncloned;}returnDfs(node);}}